Drones are now a common part of our lives — from filming weddings, advertisements, racing drones, to monitoring industrial and critical infrastructure.
However, they are not always desirable “visitors,” and thus drone detection can be an absolute priority. A life-saving priority.
This article is based on the work “Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing” published in IEEE (back in 2018).
This research was brought to attention by Martin Wolker on Twitter/X.
In connection with this article, there might be an interesting article about the destruction of Russian bombers using drones controlled by the Orange Pi single-board computer.
What methods can be used to detect drones?
The simplest methods are
- video – detection based on visual imagery
- disadvantages: requires direct visibility, poorer detection in bad weather or at night
- infrared sensors – heat detection
- disadvantages: only works at short distances
- drone sound image detection
- disadvantages: ineffective in noisy environments
- MAC/SSID detection – monitoring network addresses
- disadvantages: easily circumvented
- radar – analysis of radar reflections
- disadvantages: detection depends on drone size and materials used
- RF detection
- Active – uses transmitters for analysis based on the Doppler effect
- Passive – uses only a receiver, operates without the need for transmission
This research focuses on passive drone detection. In the context of the war initiated by Russia against Ukraine, this detection is vital and can even reveal a drone controlled through optical fiber. Moreover, the entire device is very inexpensive.
Detection – what you need

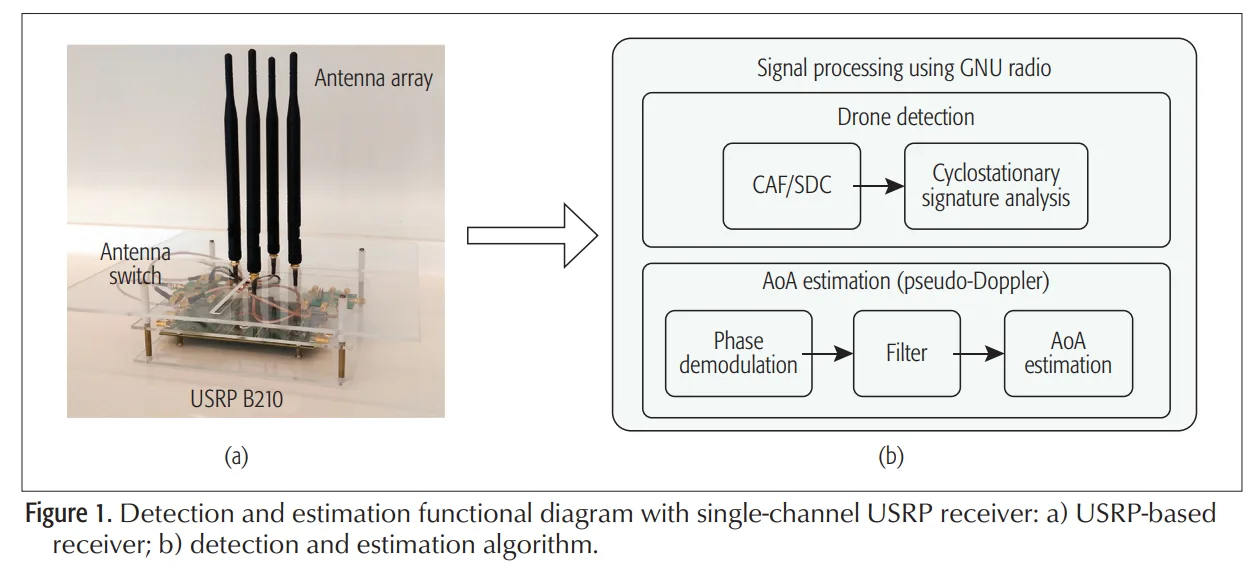
Detecting a drone does not require unreasonable costs. People who have dealt with this issue have utilized the USRP B210 module.
If you sacrifice detection sensitivity, a regular and very cheap SDR – Software Defined Radio, such as RTL-SDR will suffice.

In the case of drone detection, a switching antenna system is also needed. This allows not only the detection of the drone but also its approximate flight direction.
The drone communicates – look for cyclostationary signals
Most “ordinary drones” communicate with the ground via Wi-Fi or proprietary RF protocols, often in the ISM band (2.4 to 2.48 GHz). Their signals (especially video streaming) have a clearly defined structure (for example, using OFDM modulation), which — unlike “random noise” — exhibits cyclostationary properties (statistical periodicity over time).
Explanation of the term “cyclostationary signal”
This is a type of random signal whose static properties change periodically over time. The signal appears random, but there is a certain repeating pattern that can be detected.
Such patterns include periodic amplitude modulation (OFDM modulation) or repeated transmission of the same transmission sequences (signal preamble).
In addition to detecting the drone itself, it is also possible to estimate the direction from which it is flying, thanks to the switching of antennas and the detection of signal changes between antennas.
Switching antennas simulates the rotation of antennas (“pseudo-Doppler method”), and in combination with phase detection and filters, it is possible to achieve not only drone detection but also determine its direction.
Explanation of the pseudo-Doppler method
The use of this method requires an array of antennas, preferably arranged in a circle. Rapid switching of these antennas achieves a “rotational” motion of the antennas – the antennas do not physically rotate, but this behavior appears to the receiver. Changes in phase and frequency can then be demodulated and compared to reveal both the drone and, importantly, its flight direction (Angle of Arrival – AoA).
The drone does not transmit anything (or uses optical fiber for communication) – detect changes in ambient RF signals
Drones that fly autonomously – using GPS, object recognition on the ground – do not transmit RF signals and only listen to see if they receive any data from the controller during flight. Therefore, the drone does not need to transmit any data on its own.
Similarly, a drone flying with optical fiber through which it communicates with the controller – receiving commands, sending flight data and images – can be detected in the same way.
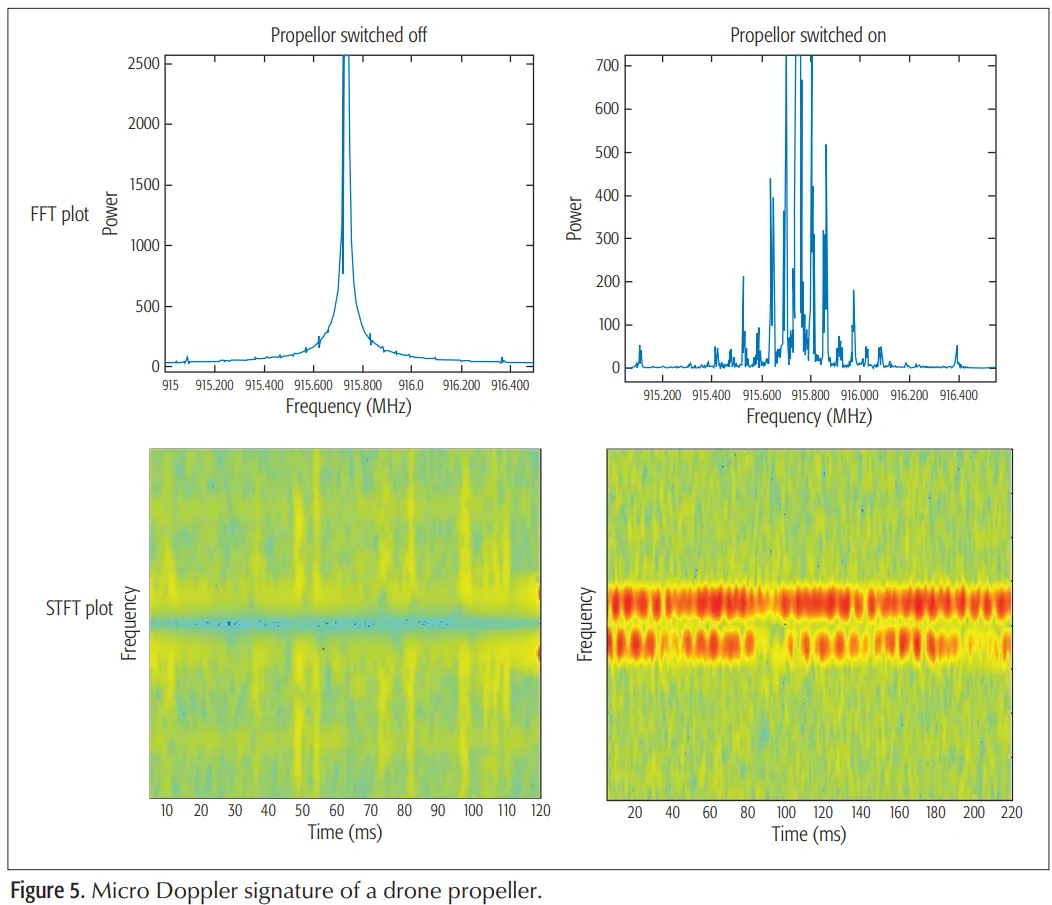
Even so, these drones can be detected in a “simple” way – by detecting changes in waves from other transmitters – such as LTE, 5G, radio, etc. A flying drone disrupts these waves due to rotor rotation, creating a micro-Doppler effect.
Conclusion
The greatest advantage of detection using SDR is its low cost and small size — the entire device can fit into a backpack, powered by a battery, and the antenna array is not large at all.
It can be used on mobile platforms as well as on static points (for example, a rooftop, window, car…). The detector is passive – meaning it does not transmit anything and therefore cannot be detected.
SDR provides the ability to detect, analyze, and track drones without expensive radars or complex systems. In urban environments, it is necessary to account for deteriorated propagation conditions (“no direct line of sight”), where adaptive algorithms and higher quality antennas come in handy.
You can find the published article at https://www.researchgate.net/publication/324511855_Low-Complexity_Portable_Passive_Drone_Surveillance_via_SDR-Based_Signal_Processing






{kind=link}
{kind=link}